General Description
Two dedicated external outputs of CANNY 7 controller, located on the 4-pin connector: CAN-H and CAN-L, provided for connection to digital information CAN-bus.
Driver's registers
Below is a description of valid values for registers controlling CAN-bus driver operation.
CAN driver configuration registers allows to set the parameters of the controller as a CAN bus node:
| Address
|
Expected values
|
|
|
| 1...8
|
=
|
driver activation and CAN-messages transmit/receive speed setting (defined by a special constant of constants directory);
|
| 0
|
=
|
style="padding-left:0.5em;"driver disabled.
|
|
| CAN Acceptance Filter Identifier Register IDL 0
|
| ...
|
| CAN Acceptance Filter Identifier Register IDL 15
|
|
| 0...65535
|
=
|
set filter value for lower part of CAN-message identifier(bits 0...10 identifier standard format or bits 0...15 expanded identifier format);
|
|
| CAN Acceptance Filter Identifier Register IDH 0
|
| ...
|
| CAN Acceptance Filter Identifier Register IDH 15
|
|
| 0...32767
|
=
|
set filter value for higher part of CAN-message identifier (bits 16...28 expanded identifier format);
|
|
| CAN Listen Only Mode Enable Register
|
|
| 1
|
=
|
CAN messages passive reception mode enabled (listen only);
|
| 0
|
=
|
CAN messages reception and transmission mode enabled (normal);
|
|
| CAN Acceptance Filter Enable Register
|
|
| 1
|
=
|
CAN received messages filtering mode enabled;
|
| 0
|
=
|
CAN received messages filtering mode disabled.
|
|
| Note:
|
In passive receiving CAN messages mode (listen only), unlike normal CAN mode, the driver operates to receive data from CAN-bus, but does not send a confirmation of reception and does not puts network in an error state when it detects such. Thus, the controller remains invisible to the other devices on the bus, does not prove itself. For normal network operation, there must be present at least two devices operating in the normal mode.
|
| Note:
|
When filter mode enabled the CAN driver will accept only those messages whose identifiers match values in CAN message receive filter installation registers, ignoring all others.
|
CAN driver configuration is defined by a constant predetermined data transmission/reception speed.
| Parameter
|
A list of acceptable values
|
| Data transmission/reception speed, Kbit/s
|
10; 33; 50; 83; 100; 125; 250; 500; 1000
|
Named constants that represent CAN configuration parameters combination, available to the user in the "CAN Modes" CannyLab constants directory, which can be accessed via function block entry context menu having "constant" type.
CAN driver diagnostics registers allows the user to determine the status of the driver in one or another moment of a diagram execution.
| Address
|
Returning Values
|
| CAN driver absence activity register
|
|
| 1
|
=
|
CAN driver activity is absent, the bus is idle, the data reception is not performed;
|
| 0
|
=
|
CAN activity registered.
|
|
|
|
| 1
|
=
|
error, CAN buffer is full;
|
| 0
|
=
|
no overflow of the receive buffer.
|
|
| CAN Receive Error Register
|
|
| 1
|
=
|
CAN reception error rate exceeds a threshold;
|
| 0
|
=
|
CAN reception error rate below an acceptable threshold.
|
|
| CAN data buffer readiness register
|
|
| 1
|
=
|
CAN driver data buffer is empty and ready to receive new messages;
|
| 0
|
=
|
CAN driver data buffer is not ready.
|
|
CAN driver receiving registers allows access to the values obtained on the bus.
| Address
|
Return values
|
| CAN Data Set Ready Register
|
|
| 1
|
=
|
в буфере приема драйвера CAN находится полученное сообщение, данное значение появляется в регистре на один цикл выполнения диаграммы сообщая об актуальности данных, находящихся в буфере приема;
|
| 0
|
=
|
в буфере приема драйвера CAN нет актуальных данных.
|
|
| CAN Received Data Register IDL
|
|
| 0...65535
|
=
|
значение младшей части идентификатора полученного CAN-сообщения.
|
|
| CAN Received Data Register IDH
|
|
| 0...32767
|
=
|
значение старшей части идентификатора полученного CAN-сообщения.
|
|
| CAN Received Data Register ERL
|
|
| 0...ER + 8
|
=
|
значение, равное количеству байт данных в принятом сообщении, признаки EXT и RTR (см. примечание).
|
|
| CAN Received Data Register D1:D0
|
| ...
|
| CAN Received Data Register D7:D6
|
|
| 0...65535
|
=
|
значения соответствующих байт данных принятого сообщения CAN, по два байта на регистр.
|
|
| Примечание:
|
Регистр принятого сообщения CAN ERL, помимо числа байт в принятом сообщении 0...8 в младших битах, содержит в своих старших битах информацию о специальных признаках сообщения: бит 15 - признак EXT и бит 14 признак RTR. Где EXT = 1 при приеме сообщения в расширенном формате, EXT = 0 при стандартном формате сообщения; RTR = 1 при приеме удаленного запроса данных, EXT = 0 при приеме обычного сообщения.
|
Регистры передачи сообщений CAN используются для размещения в буфере передачи драйвера данных, подлежащих отправке.
| Адрес
|
Ожидаемые значения
|
| CAN Request To Send Register
|
|
| 1
|
=
|
загрузить данные из регистров передачи в буфер передачи драйвера CAN;
|
| 0
|
=
|
не загружать данные в буфер передачи драйвера CAN.
|
|
| CAN Transmit Data Register IDL
|
|
| 0...65535
|
=
|
значение младшей части идентификатора передаваемого CAN-сообщения.
|
|
| CAN Transmit Data Register IDH
|
|
| 0...32767
|
=
|
значение старшей части идентификатора передаваемого CAN-сообщения.
|
|
| CAN Transmit Data Register ERL
|
|
| 0...ER + 8
|
=
|
значение, равное количеству байт данных в передаваемом сообщении, признаки EXT и RTR (см. примечание).
|
|
| CAN Transmit Data Register D1:D0
|
| ...
|
| CAN Transmit Data Register D7:D6
|
|
| 0...65535
|
=
|
значения соответствующих байт данных передаваемого сообщения CAN, по два байта на регистр.
|
|
| Примечание:
|
Регистр сообщения передачи CAN ERL, помимо числа байт в передаваемом сообщении 0...8 в младших битах, содержит в своих старших битах информацию о специальных признаках сообщения: бит 15 - признак EXT и бит 14 признак RTR. Где EXT = 1 при передаче сообщения в расширенном формате, EXT = 0 при стандартном формате сообщения; RTR = 1 при передаче удаленного запроса данных, EXT = 0 при передаче обычного сообщения.
|
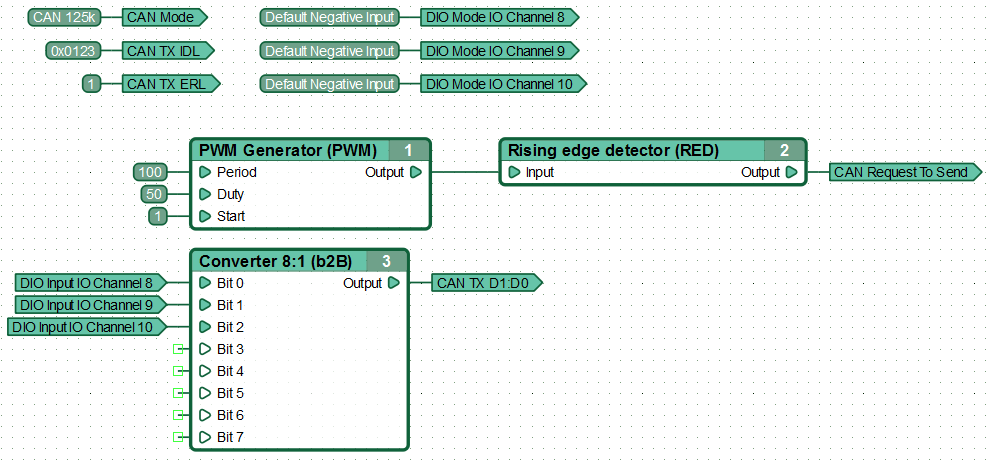
Пример функциональной диаграммы отправки данных в шину CAN. Выполняя диаграмму контроллер, с периодичностью 1 раз в 100мс, передает в шину на скорости 125 кБод данные о состоянии трех своих входов, используя сообщения стандартного формата с идентификатором 0x123, содержащие один байт данных.
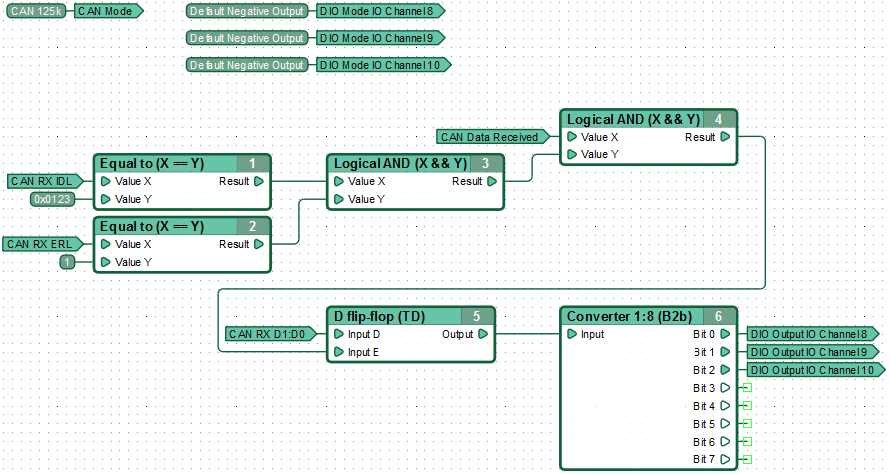
Пример функциональной диаграммы приема данных из шины CAN. Выполняя диаграмму контроллер, получая по шине сообщения стандартного формата с идентификатором 0x0123, содержащие один байт данных, устанавливает на трех своих выходах состояние в соответствии с полученным значением.
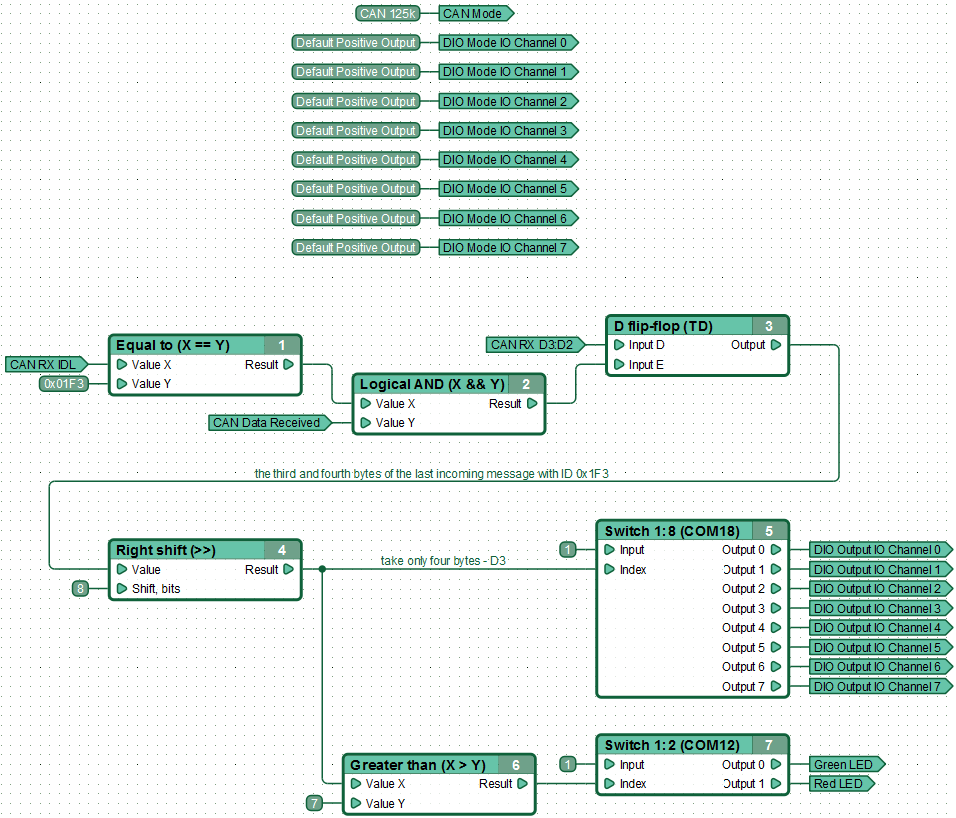
Пример функциональной диаграммы приема данных из шины CAN. Выполняя диаграмму контроллер, получая по шине сообщения стандартного формата с идентификатором 0x01F3, анализирует содержащееся в одном из байтов сообщения значение и устанавливает на своих выходах и встроенном светодиоде соответствующие состояния.
See also
CANNY 7
CANNY 7, LIN Driver


